Overview
Abstract
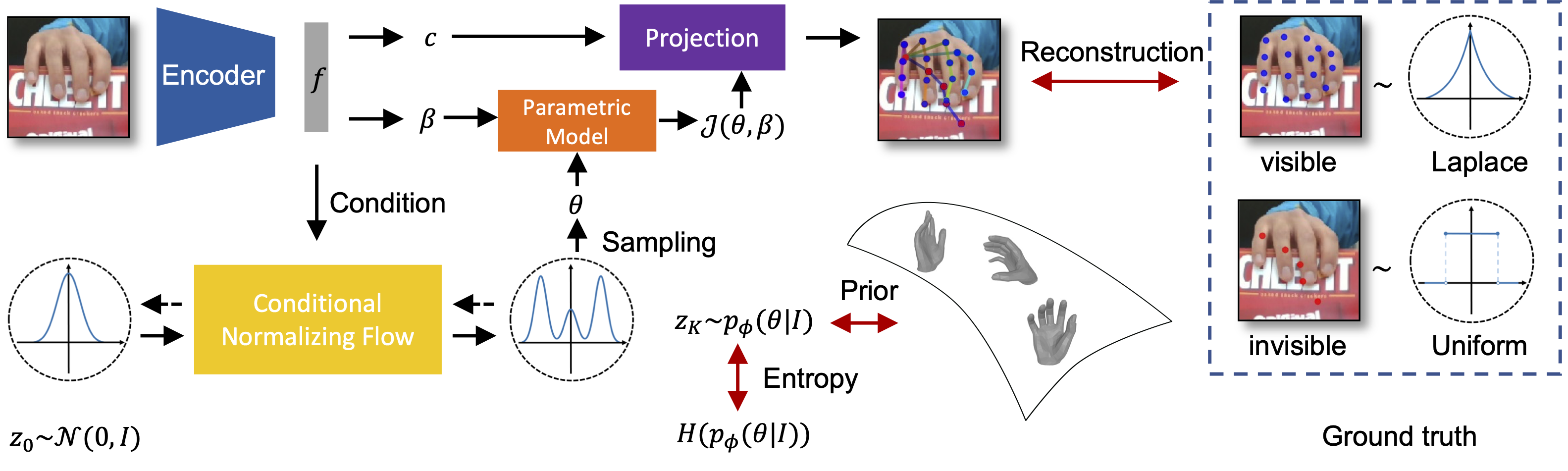
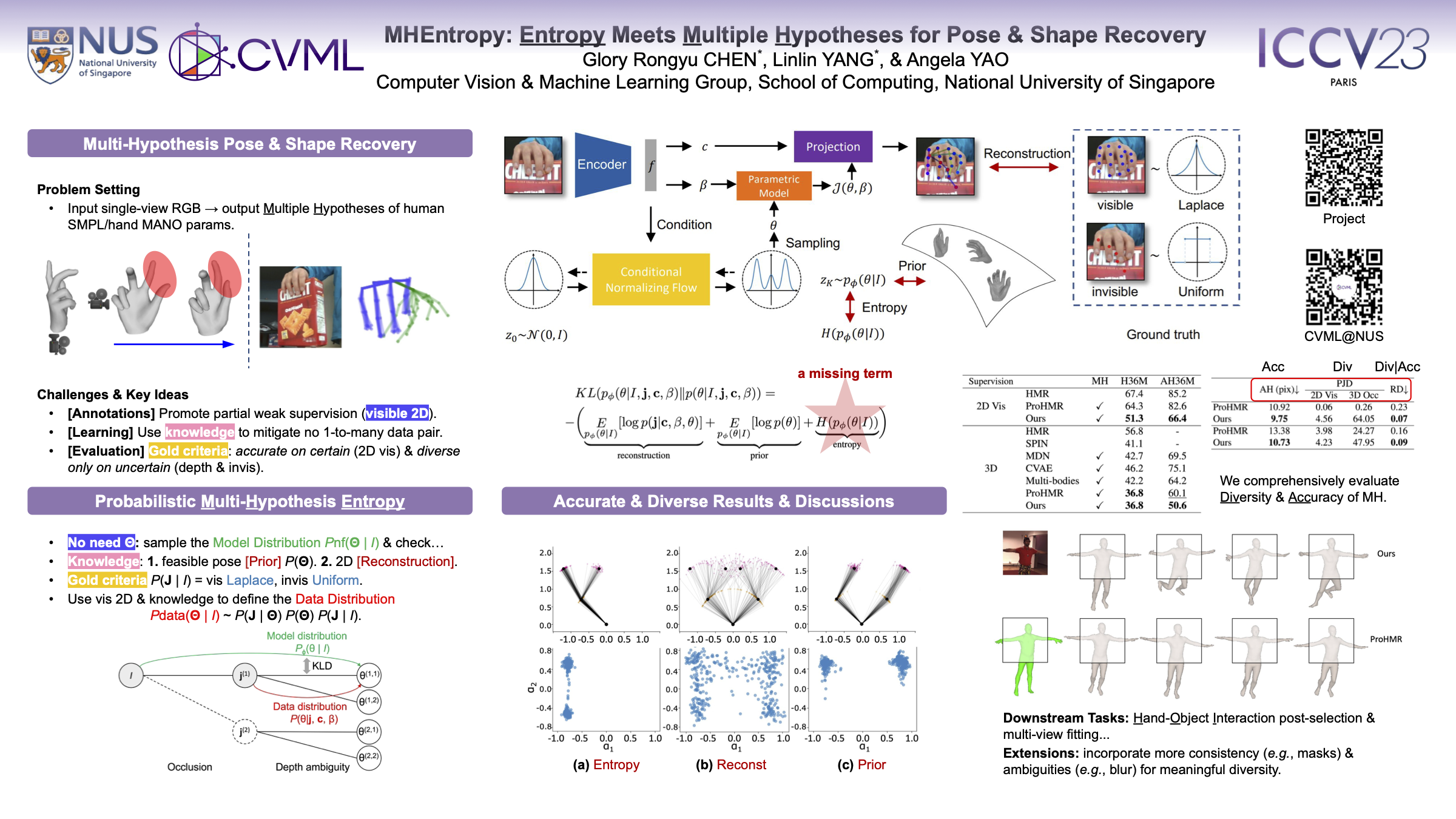
For monocular RGB-based 3D pose and shape estimation, multiple solutions are often feasible due to factors like occlusions and truncations. This work presents a multi-hypothesis probabilistic framework by optimizing the Kullback–Leibler divergence (KLD) between the data and model distribution. Our formulation reveals a connection between the pose entropy and diversity in the multiple hypotheses that has been neglected by previous works. For a comprehensive evaluation, besides the best hypothesis (BH) metric, we factor in visibility for evaluating diversity. Additionally, our framework is label-friendly – it can be learned from only partial 2D keypoints, such as visible keypoints. Experiments on both ambiguous and realworld benchmarks demonstrate that our method outperforms other state-of-the-art multi-hypothesis methods.
Poster
Presentation
Citation
@inproceedings{chenyang2023MHEntropy,
title={ {MHEntropy}: Entropy Meets Multiple Hypotheses for Pose and Shape Recovery},
author={Chen, Rongyu and Yang, Linlin and Yao, Angela},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
year={2023}
}